Pipelines and Commands¶
In addition to providing abstract pipeline functionality, Raster Vision provides a set of concrete pipelines for deep learning on remote sensing imagery including ChipClassification, SemanticSegmentation, and ObjectDetection. These pipelines all derive from RVPipeline, and are provided by the rastervision.core package. It’s possible to customize these pipelines as well as create new ones from scratch, which is discussed in Customizing Raster Vision.

Chip Classification¶
In chip classification, the goal is to divide the scene up into a grid of cells and classify each cell. This task is good for getting a rough idea of where certain objects are located, or where indiscrete “stuff” (such as grass) is located. It requires relatively low labeling effort, but also produces spatially coarse predictions. In our experience, this task trains the fastest, and is easiest to configure to get “decent” results.
Object Detection¶
In object detection, the goal is to predict a bounding box and a class around each object of interest. This task requires higher labeling effort than chip classification, but has the ability to localize and individuate objects. Object detection models require more time to train and also struggle with objects that are very close together. In theory, it is straightforward to use object detection for counting objects.
Semantic Segmentation¶
In semantic segmentation, the goal is to predict the class of each pixel in a scene. This task requires the highest labeling effort, but also provides the most spatially precise predictions. Like object detection, these models take longer to train than chip classification models.
Configuring RVPipelines¶
Each (subclass of) RVPipeline is configured by returning an instance of (a subclass of) RVPipelineConfig from a get_config() function in a Python module. It’s also possible to return a list of RVPipelineConfigs from get_configs(), which will be executed in parallel.
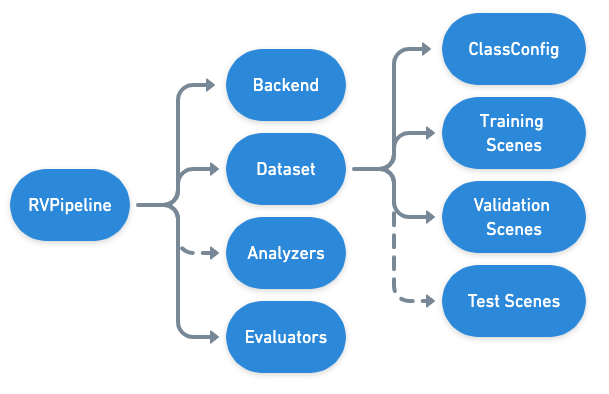
Each RVPipelineConfig object specifies the details about how the commands within the pipeline will execute (ie. which files, what methods, what hyperparameters, etc.). In contrast, the pipeline runner, which actually executes the commands in the pipeline, is specified as an argument to the Command Line Interface. The following diagram shows the hierarchy of the high level components comprising an RVPipeline:
In the tiny_spacenet.py example, the SemanticSegmentationConfig is the last thing constructed and returned from the get_config function.
chip_sz = 300
chip_options = SemanticSegmentationChipOptions(
window_method=SemanticSegmentationWindowMethod.random_sample,
chips_per_scene=10)
return SemanticSegmentationConfig(
root_uri=root_uri,
dataset=dataset,
backend=backend,
train_chip_sz=chip_sz,
predict_chip_sz=chip_sz,
chip_options=chip_options)
See also
The ChipClassificationConfig, ObjectDetectionConfig, and SemanticSegmentationConfig API docs have more information on configuring pipelines.
Commands¶
The RVPipelines provide a sequence of commands, which are described below.
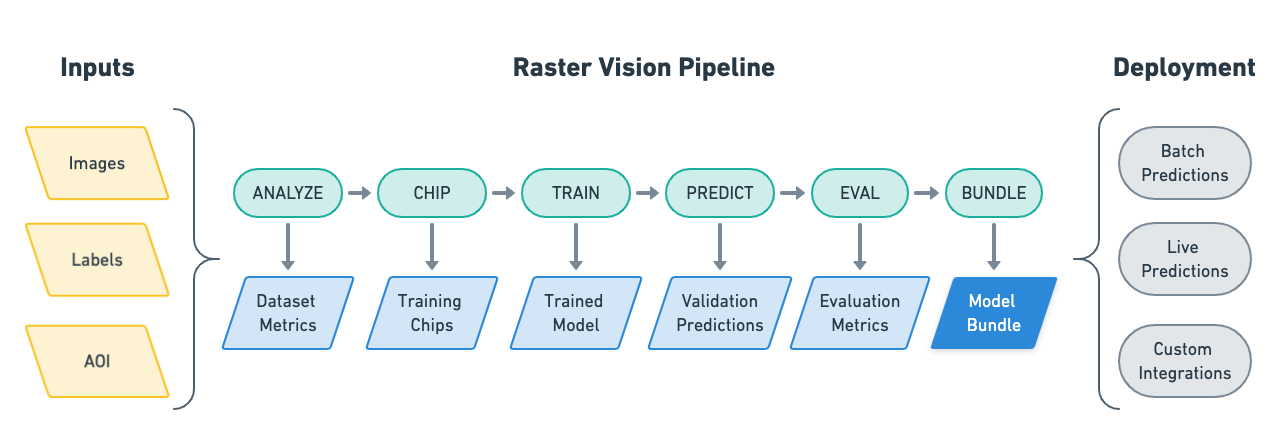
ANALYZE¶
The ANALYZE command is used to analyze scenes that are part of an experiment and produce some output that can be consumed by later commands. Geospatial raster sources such as GeoTIFFs often contain 16- and 32-bit pixel color values, but many deep learning libraries expect 8-bit values. In order to perform this transformation, we need to know the distribution of pixel values. So one usage of the ANALYZE command is to compute statistics of the raster sources and save them to a JSON file which is later used by the StatsTransformer (one of the available RasterTransformer) to do the conversion.
CHIP¶
Scenes are comprised of large geospatial raster sources (e.g. GeoTIFFs) and geospatial label sources (e.g. GeoJSONs), but models can only consume small images (i.e. chips) and labels in pixel based-coordinates. In addition, each Backend has its own dataset format. The CHIP command solves this problem by converting scenes into training chips and into a format the backend can use for training.
TRAIN¶
The TRAIN command is used to train a model using the dataset generated by the CHIP command. The command uses the Backend to run a training loop that saves the model and other artifacts each epoch. If the training command is interrupted, it will resume at the last epoch when restarted.
PREDICT¶
The PREDICT command makes predictions for a set of scenes using a model produced by the TRAIN command. To do this, a sliding window is used to feed small images into the model, and the predictions are transformed from image-centric, pixel-based coordinates into scene-centric, map-based coordinates.
EVAL¶
The EVAL command evaluates the quality of models by comparing the predictions generated by the PREDICT command to ground truth labels. A variety of metrics including F1, precision, and recall are computed for each class (as well as overall) and are written to a JSON file.
Backend¶
The collection of RVPipelines use a “backend” abstraction inspired by Keras, which makes it easier to customize the code for building and training models (including using Raster Vision with arbitrary deep learning libraries).
Each backend is a subclass of Backend and has methods for saving training chips, training models, and making predictions, and is configured with a BackendConfig.
The rastervision.pytorch_backend plugin provides backends that are thin wrappers around the rastervision.pytorch_learner package, which does most of the heavy lifting of building and training models using torch and torchvision. (Note that rastervision.pytorch_learner is decoupled from rastervision.pytorch_backend so that it can be used in conjunction with rastervision.pipeline to write arbitrary computer vision pipelines that have nothing to do with remote sensing.)
Here are the PyTorch backends:
The
PyTorchChipClassificationbackend trains classification models from torchvision.The
PyTorchObjectDetectionbackend trains the Faster-RCNN model in torchvision.The
PyTorchSemanticSegmentationbackend trains the DeepLabV3 model in torchvision.
In our tiny_spacenet.py example, we configured the PyTorch semantic segmentation backend using:
backend = PyTorchSemanticSegmentationConfig(
model=SemanticSegmentationModelConfig(backbone=Backbone.resnet50),
solver=SolverConfig(lr=1e-4, num_epochs=1, batch_sz=2))
See also
The rastervision.pytorch_backend and rastervision.pytorch_learner API docs have more information on configuring backends.
Dataset¶
A Dataset contains the training, validation, and test splits needed to train and evaluate a model. Each dataset split is a list of Scenes.
In our tiny_spacenet.py example, we configured the dataset with single scenes, though more often in real use cases you would use multiple scenes per split:
dataset = DatasetConfig(
class_config=class_config,
train_scenes=[
make_scene('scene_205', train_image_uri, train_label_uri)
],
validation_scenes=[
make_scene('scene_25', val_image_uri, val_label_uri)
])
See also
The DatasetConfig API docs.
Scene¶
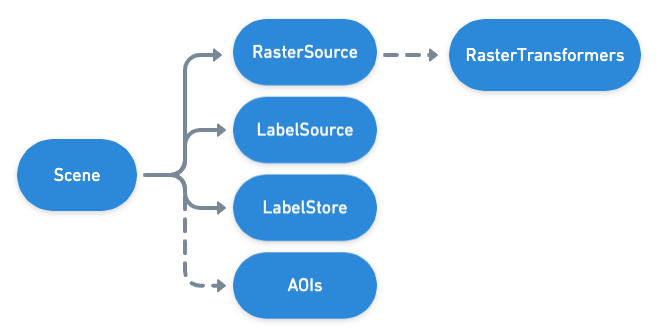
A scene is composed of the following elements:
Imagery: a RasterSource represents a large scene image, which can be made up of multiple sub-images or a single file.
Ground truth labels: a LabelSource represents ground-truth task-specific labels.
Predicted labels: a LabelStore determines how to store and retrieve the predictions from a scene.
AOIs (Optional): An optional list of areas of interest that describes which sections of the scene imagery are exhaustively labeled. It is important to only create training chips from parts of the scenes that have been exhaustively labeled – in other words, that have no missing labels.
In our tiny_spacenet.py example, we configured the one training scene with a GeoTIFF URI and a GeoJSON URI.
def make_scene(scene_id, image_uri, label_uri):
"""
- StatsTransformer is used to convert uint16 values to uint8.
- The GeoJSON does not have a class_id property for each geom,
so it is inferred as 0 (ie. building) because the default_class_id
is set to 0.
- The labels are in the form of GeoJSON which needs to be rasterized
to use as label for semantic segmentation, so we use a RasterizedSource.
- The rasterizer set the background (as opposed to foreground) pixels
to 1 because background_class_id is set to 1.
"""
raster_source = RasterioSourceConfig(
uris=[image_uri],
channel_order=channel_order,
transformers=[StatsTransformerConfig()])
label_source = SemanticSegmentationLabelSourceConfig(
raster_source=RasterizedSourceConfig(
vector_source=GeoJSONVectorSourceConfig(
uri=label_uri, default_class_id=0, ignore_crs_field=True),
rasterizer_config=RasterizerConfig(background_class_id=1)))
return SceneConfig(
id=scene_id,
raster_source=raster_source,
label_source=label_source)
See also
The SceneConfig API docs.
RasterSource¶
A RasterSource represents a source of raster data for a scene, and has subclasses for various data sources. They are used to retrieve small windows of raster data from larger scenes. You can also set a subset of channels (i.e. bands) that you want to use and their order. For example, satellite imagery often contains more than three channels, but pretrained models trained on datasets like Imagenet only support three (RGB) input channels. In order to cope with this situation, we can select three of the channels to utilize.
RasterioSource¶
Any images that can be read by GDAL/Rasterio can be handled by the RasterioSource. This includes georeferenced imagery such as GeoTIFFs. If there are multiple image files that cover a single scene, you can pass the corresponding list of URIs, and read from the RasterSource as if it were a single stitched-together image.
The RasterioSource can also read non-georeferenced images such as .tif, .png, and .jpg files. This is useful for oblique drone imagery, biomedical imagery, and any other (potentially massive!) non-georeferenced images.
RasterizedSource¶
Semantic segmentation labels stored as polygons in a VectorSource can be rasterized and read using a RasterizedSource. This is a slightly unusual use of a RasterSource as we’re using it to read labels, and not images to use as input to a model.
See also
The RasterioSourceConfig and RasterizedSourceConfig API docs.
RasterTransformer¶
A RasterTransformer is a mechanism for transforming raw raster data into a form that is more suitable for being fed into a model.
StatsTransformer¶
This transformer is used to convert non-uint8 values to uint8 using statistics computed by the StatsAnalyzer.
See also
The StatsTransformerConfig API docs.
VectorSource¶
A VectorSource supports reading vector data like polygons and lines from various places. It is used by ObjectDetectionLabelSource and ChipClassificationLabelSource, as well as the RasterizedSource (a type of RasterSource).
GeoJSONVectorSource¶
This vector source reads GeoJSON files.
See also
The GeoJSONVectorSourceConfig API docs.
LabelSource¶
A LabelSource supports reading ground truth labels for a scene in the form of vectors or rasters.
There are subclasses for different tasks and data formats. They can be queried for the labels that lie within a window and are used for creating training chips, as well as providing ground truth labels for evaluation against validation scenes.
See also
The ChipClassificationLabelSourceConfig, SemanticSegmentationLabelSourceConfig, and ObjectDetectionLabelSourceConfig API docs.
LabelStore¶
A LabelStore supports reading and writing predicted labels for a scene. There are subclasses for different tasks and data formats. They are used for saving predictions and then loading them during evaluation.
In the tiny_spacenet.py example, there is no explicit LabelStore configured on the validation scene, because it can be inferred from the type of RVPipelineConfig it is part of.
In the ISPRS Potsdam example, the following code is used to explicitly create a LabelStore that writes out the predictions in “RGB” format, where the color of each pixel represents the class, and predictions of class 0 (ie. car) are also written out as polygons.
label_store = SemanticSegmentationLabelStoreConfig(
rgb=True, vector_output=[PolygonVectorOutputConfig(class_id=0)])
scene = SceneConfig(
id=id,
raster_source=raster_source,
label_source=label_source,
label_store=label_store)
See also
The ChipClassificationGeoJSONStoreConfig, SemanticSegmentationLabelStoreConfig, and ObjectDetectionGeoJSONStoreConfig API docs.
Analyzers¶
Analyzers are used to gather dataset-level statistics and metrics for use in downstream processes. Typically, you won’t need to explicitly configure any.
StatsAnalyzer¶
Currently the only analyzer available is the StatsAnalyzer, which determines the distribution of values over the imagery in order to normalize values to uint8 values in a StatsTransformer.
Evaluators¶
For each computer vision task, there is an evaluator that computes metrics for a trained model. It does this by measuring the discrepancy between ground truth and predicted labels for a set of validation scenes. Typically, you won’t need to explicitly configure any.