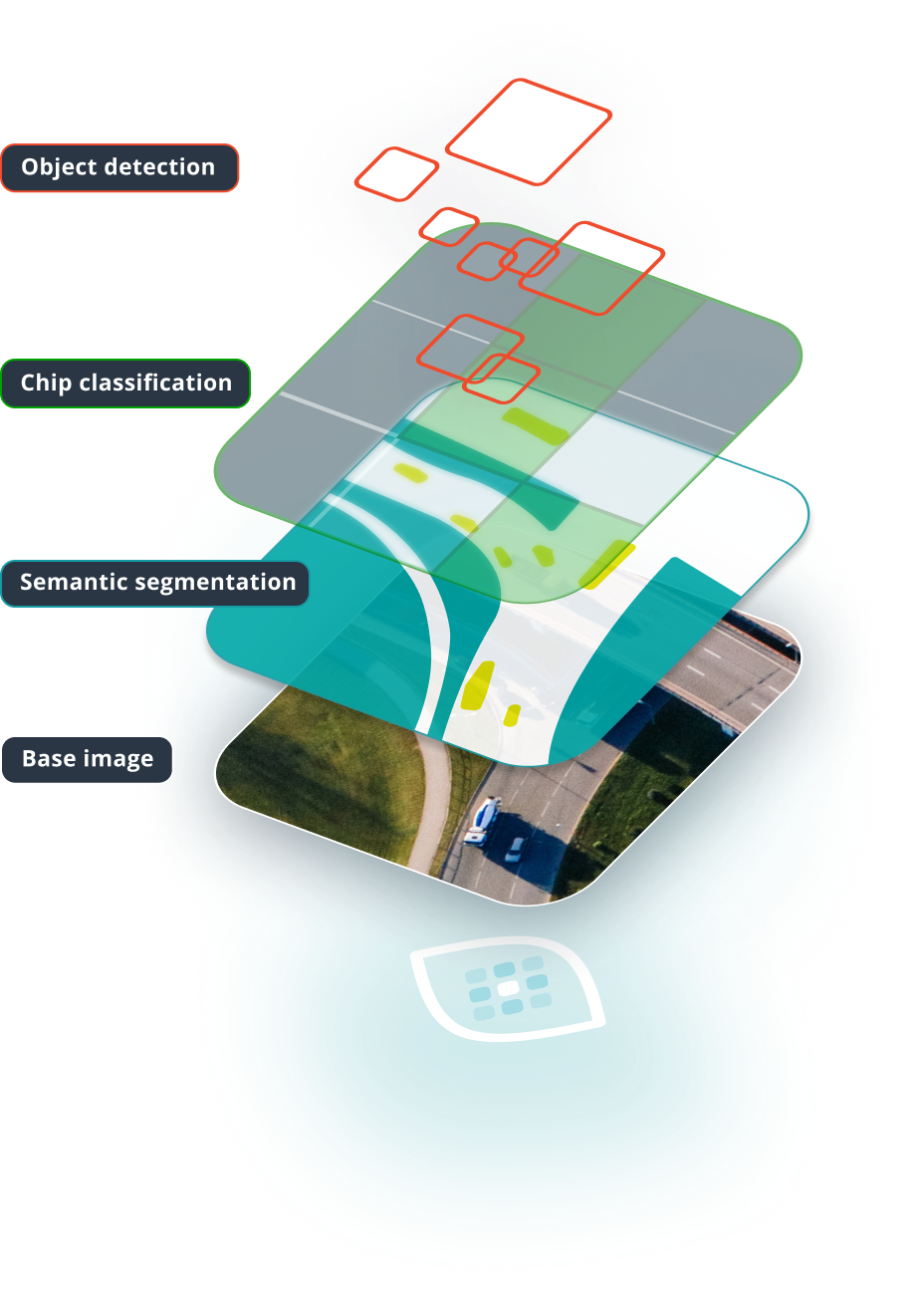
Raster Vision is an open source library and framework for Python developers building computer vision models on satellite, aerial, and other large imagery sets (including oblique drone imagery). There is built-in support for chip classification, object detection, and semantic segmentation using PyTorch.
CHANGELOG#
- CHANGELOG
- Raster Vision 0.31.1
- Raster Vision 0.31.0
- Raster Vision 0.30.1
- Raster Vision 0.30
- Raster Vision 0.21.3
- Raster Vision 0.21.2
- Raster Vision 0.21.1
- Raster Vision 0.21
- Raster Vision 0.20.2
- Raster Vision 0.20.1
- Raster Vision 0.20
- Raster Vision 0.13.1
- Raster Vision 0.13
- Raster Vision 0.12
- Raster Vision 0.11
- Raster Vision 0.10
- Raster Vision 0.9
- Raster Vision 0.8